TRITON — Automatic Antenna Tracker
Project Overview
Radio-to-WiFi bridge with auto-tracking biquad antenna for ~5km UAV telemetry range
Skills Used
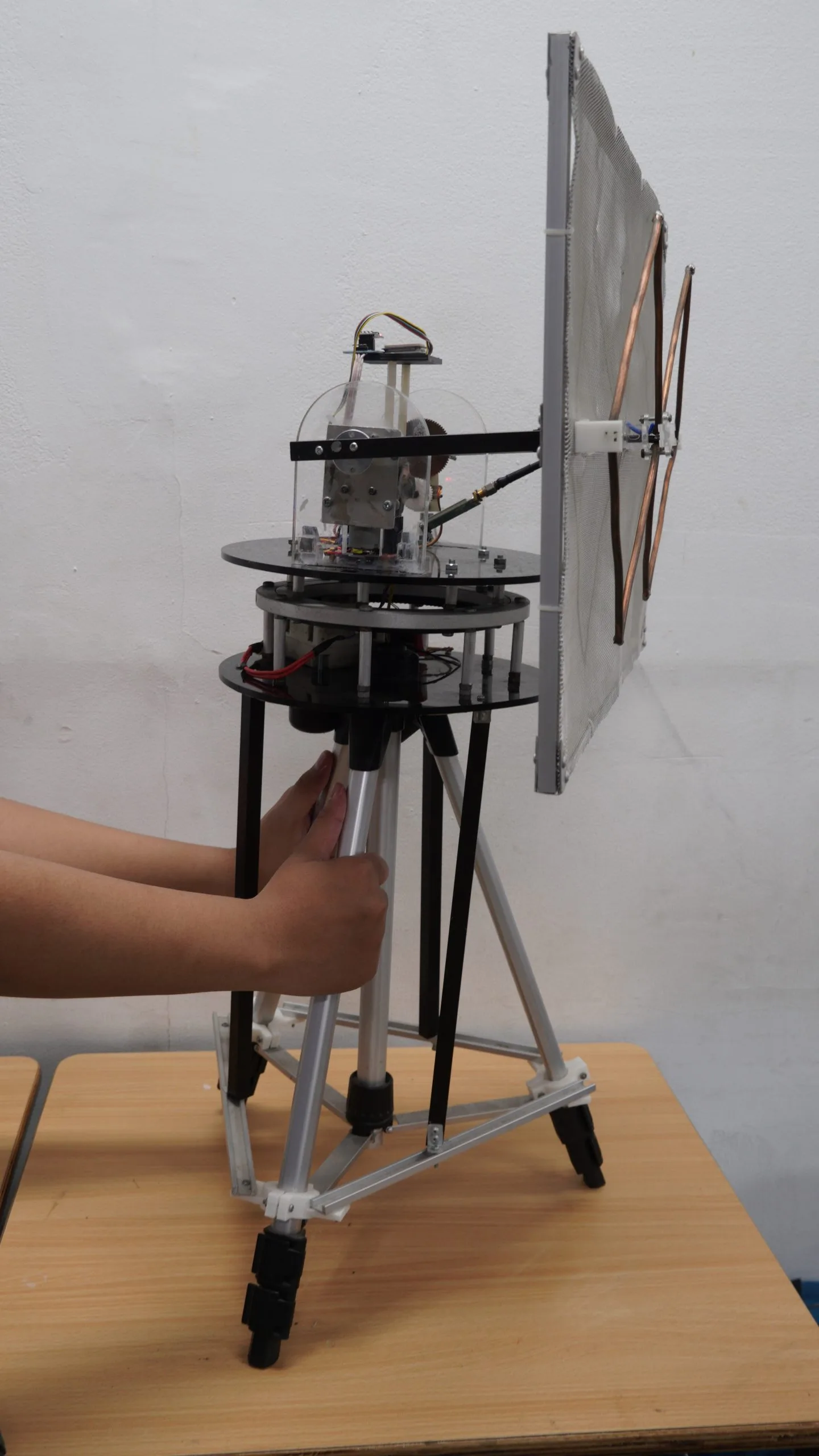
Overview
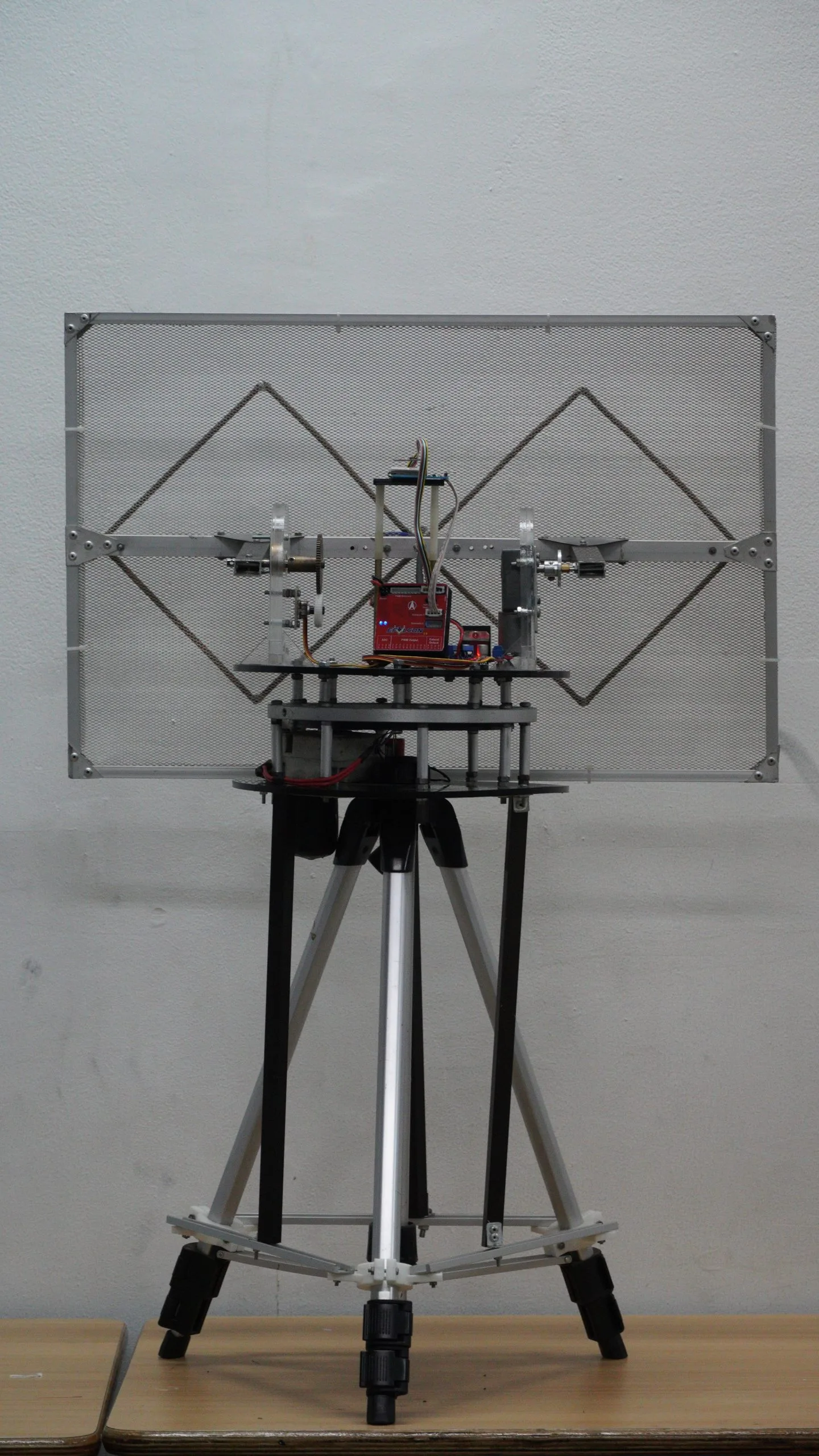
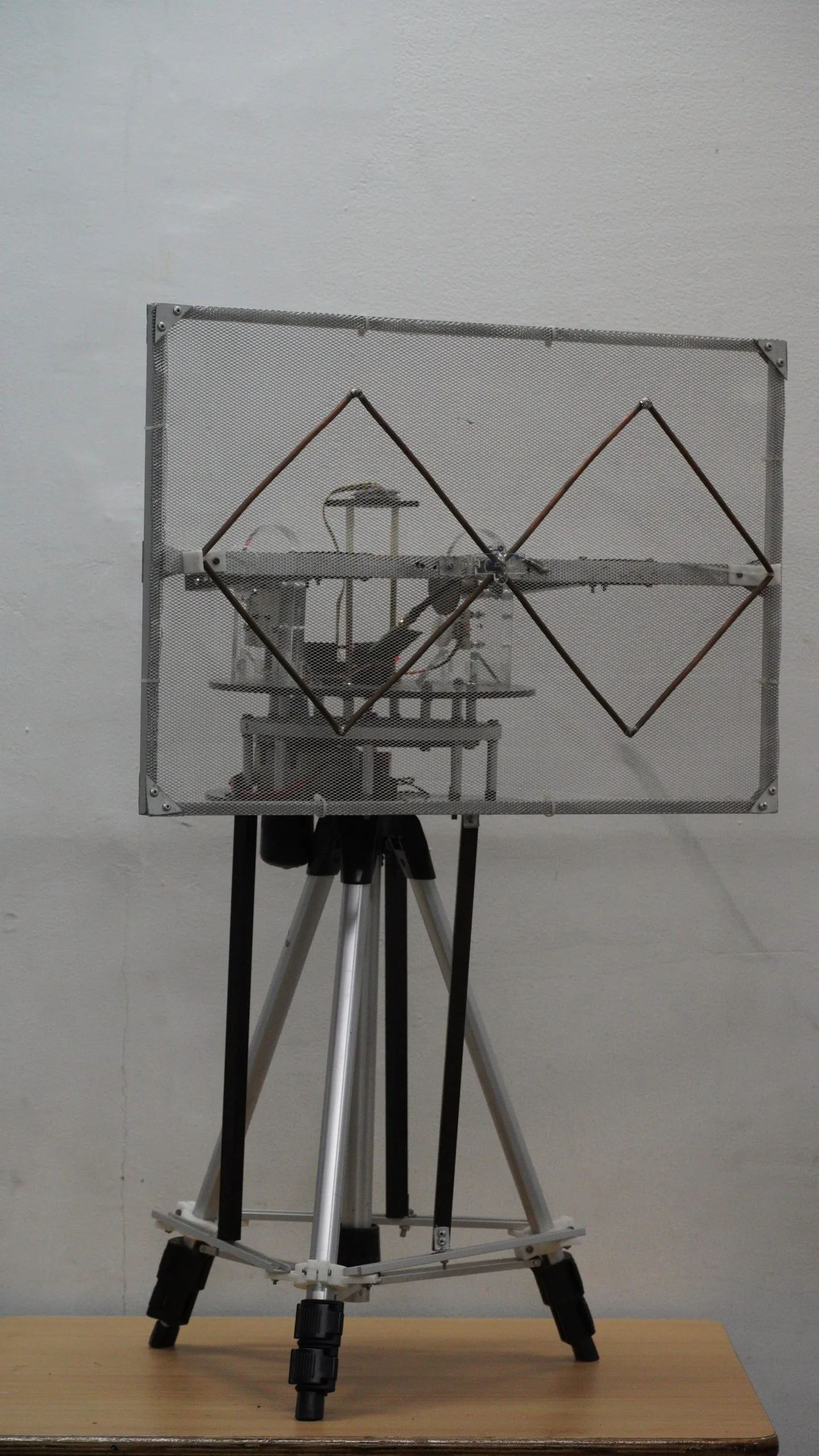
TRITON bridges long-range radio telemetry (~5km) to WiFi with automatic antenna tracking. The STM32F407-based relay station with dual-axis motors and biquad antenna receives tracking commands from PIGEON GCS, while an ESP8266 (ESP-01) module provides transparent serial-to-WiFi bridging.
Features
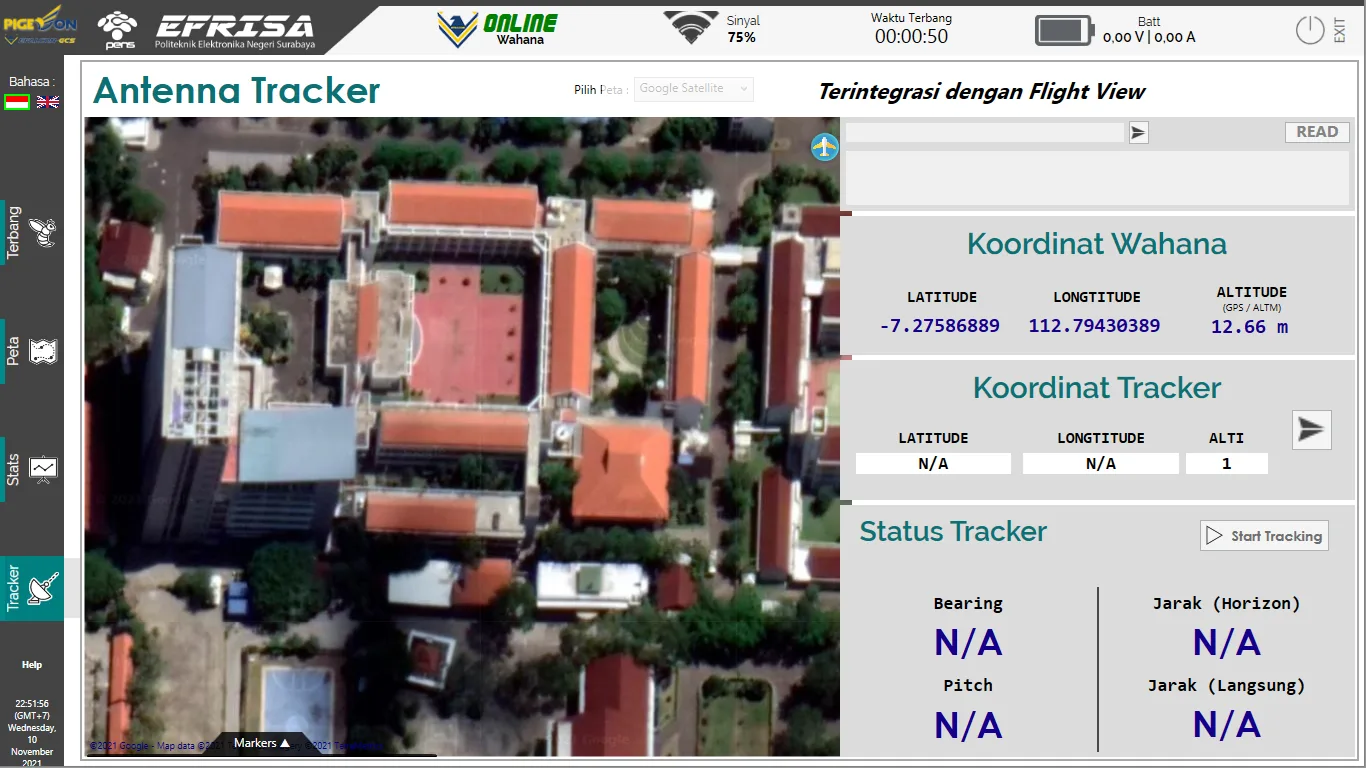
Auto-Tracking System
- PIGEON GCS calculates bearing/elevation from UAV & tracker GPS (Haversine)
- STM32 receives tracking commands and controls motors via PID
- HMC5883L magnetometer for heading, potentiometer for pitch feedback
- 500ms update rate with continuous position tracking
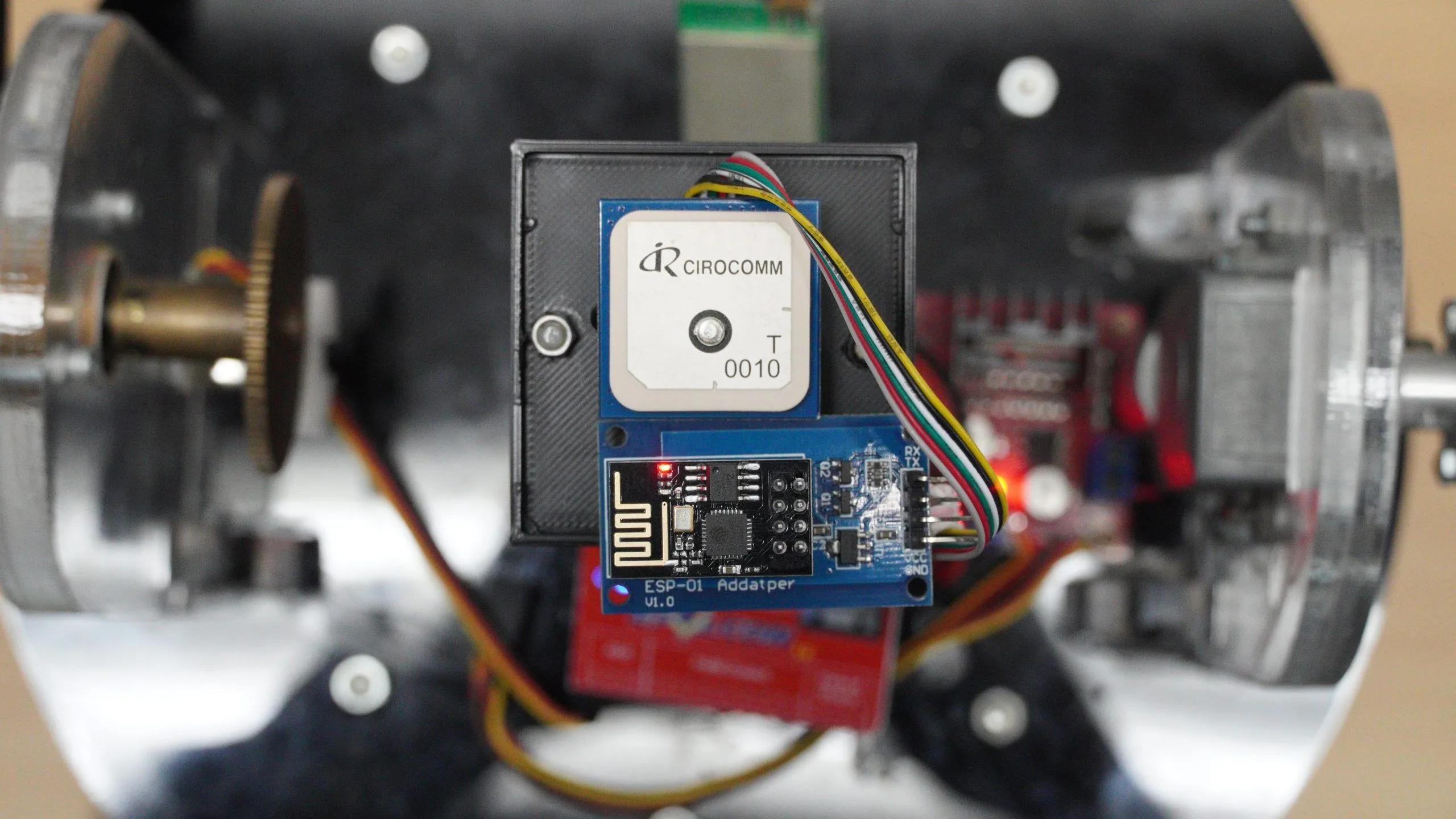
WiFi Bridge (ESP-01)
- Creates “TRITON_WIFI” Access Point for ground station
- TCP (reliable) or UDP (low-latency, multi-client) modes
- High-speed UART (up to 1Mbps) for fast telemetry forwarding
- Transparent bidirectional serial-to-WiFi bridge
- mDNS discovery as “esphw.local”
- Supports MAVLink and proprietary protocols
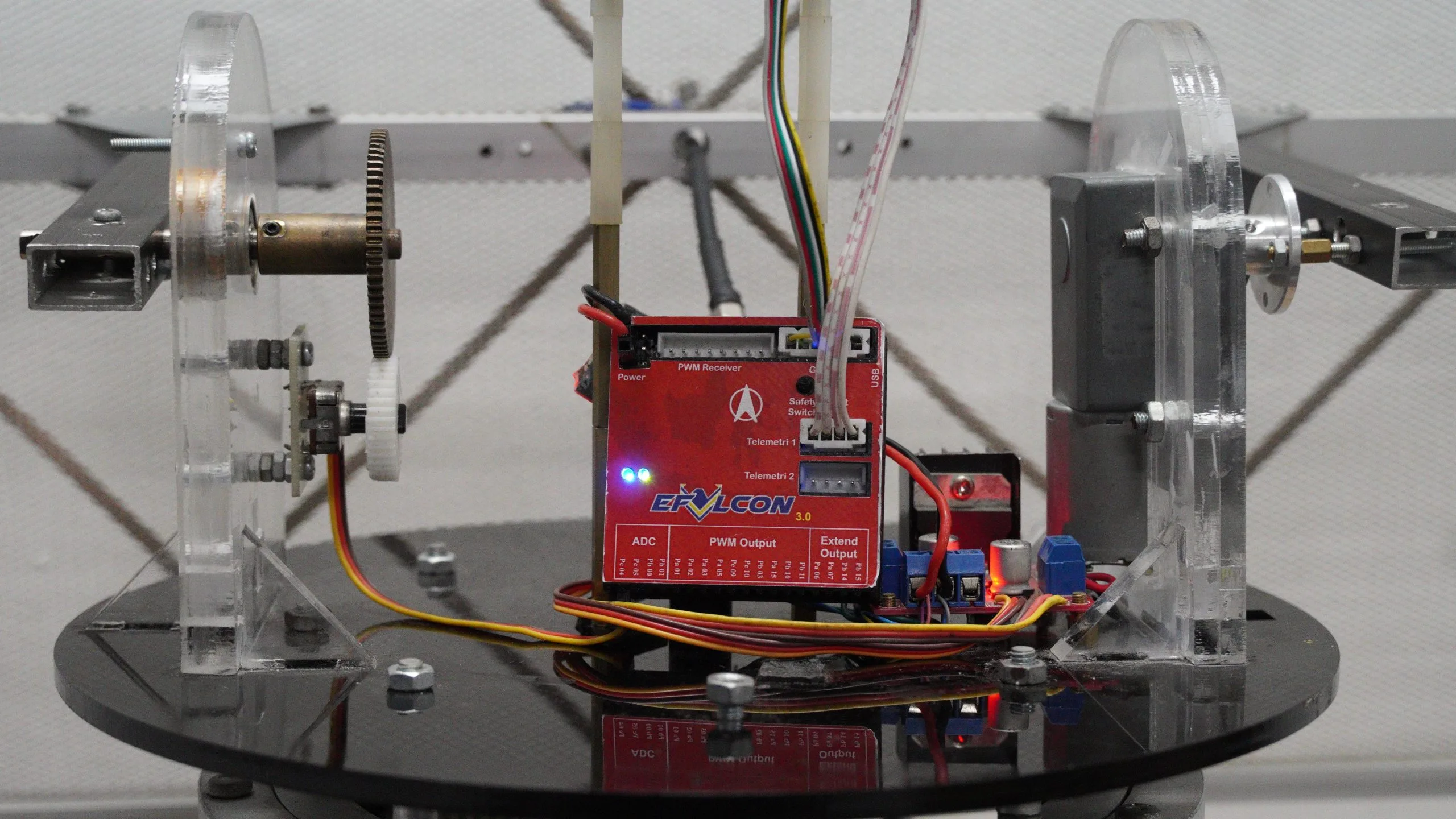
Hardware
- STM32F407VG with H-bridge motor drivers
- ESP8266 (ESP-01) WiFi module
- Biquad directional antenna (2.4GHz)
- GPS, HMC5883L compass, barometer
- 3× UART interfaces (GPS, bridge, debug)
System Architecture
UAV Radio Telemetry (~5km RF)
↕
Ground Radio RX (UART 1Mbps)
↕
TRITON Tracker (STM32 + ESP-01 relay)
↕ (WiFi AP - bidirectional)
PIGEON GCS
• Sends UAV control commands
• Calculates aim angles from GPS
• Commands tracker to aim biquad antenna
TRITON Binary Protocol (21 bytes): Header ‘T’ + Yaw + Pitch + Altitude + Lat + Lon (all float32)
Bridge Modes
- TCP: Port 61258, single client, reliable
- UDP: Multi-client (up to 10), low-latency, 10s timeout
Technical Stack
Embedded C · STM32 HAL · ESP8266/Arduino · WiFi AP Mode · TCP/UDP Bridge · GPS/GNSS · HMC5883L Compass · PID Control · H-Bridge Motor Drivers · Binary Protocols
Developed by EFRISA (EEPIS Flying Robot for Indonesia), GCS Division.
Links
EFRISA, GCS Division
Due to the commercial nature of this project, the source code is not publicly available
This description is written with help of AI tools, but the project IS NOT. You can verify the source codes via the provided links where available.