Cross-Platform Secure & Intelligent UAV Ground Control Station (GCS)
Project Overview
Bachelor's research project on a patent-pending UAV control system featuring secure AES-128 communication and intelligent stability assessment, published in IEEE IES 2022.
Skills Used
Overview
Developed as part of my bachelor’s thesis research, later published in IEEE International Electronics Symposium (IES) 2022.
Publication: DOI: 10.1109/IES55876.2022.9888714
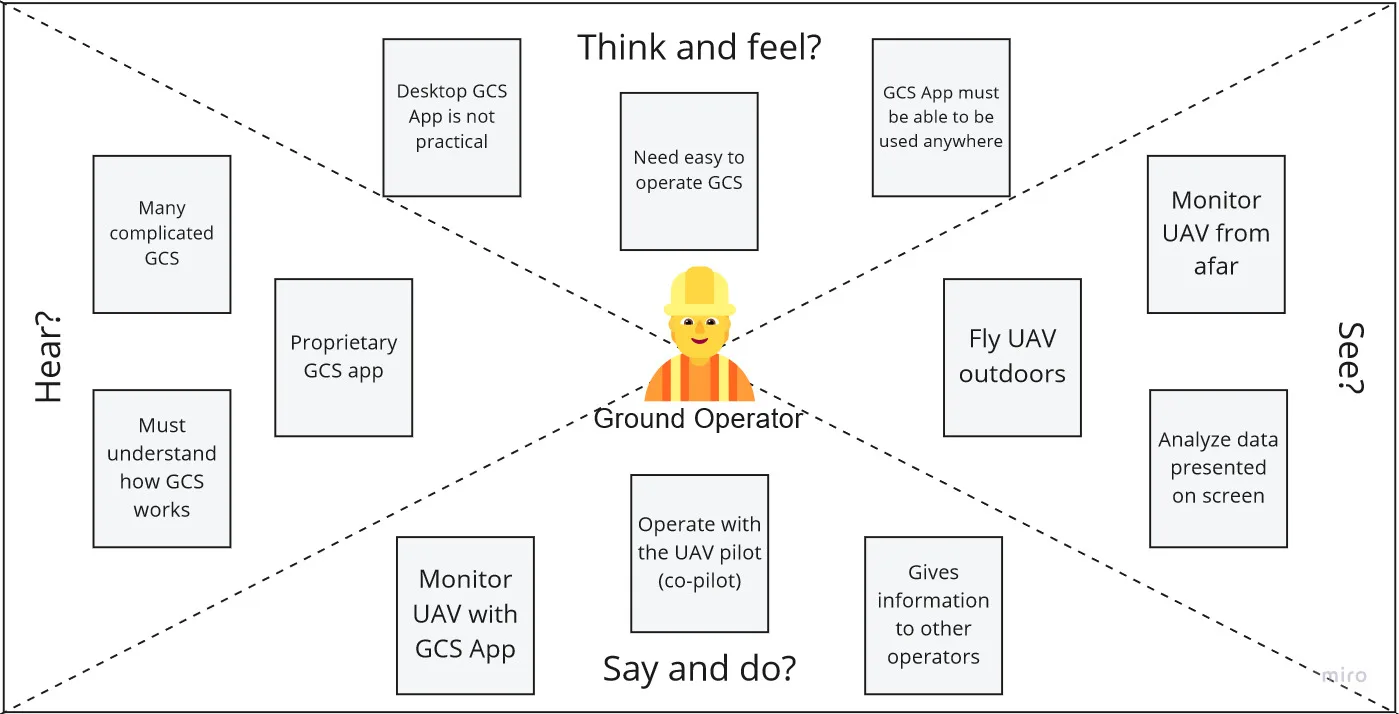
User Empathy Map
This shows what the User of a GCS Thinks & Feels, Hears, Sees, and Says & Does. Serves as the challenges to be addressed.
Key Features
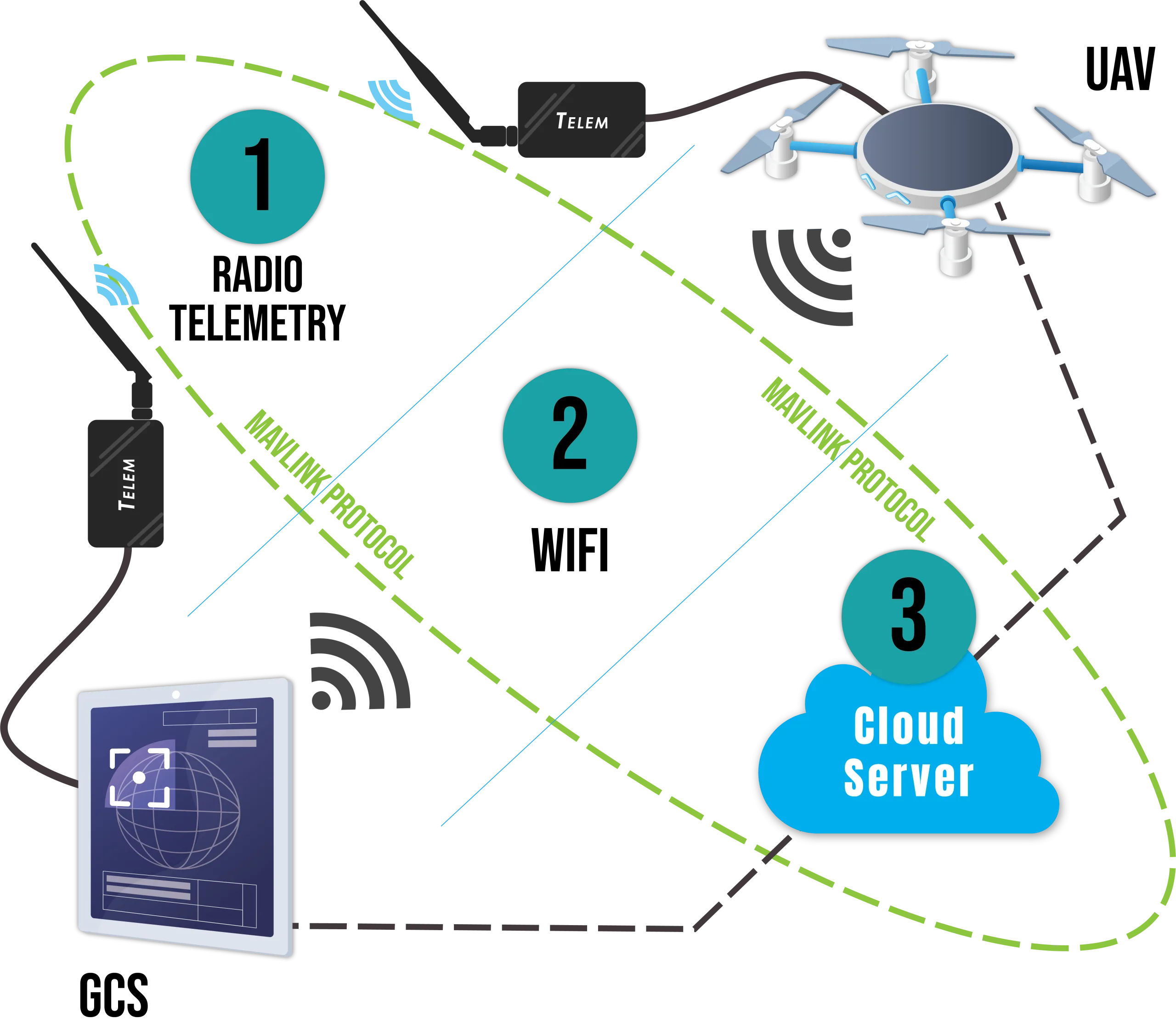
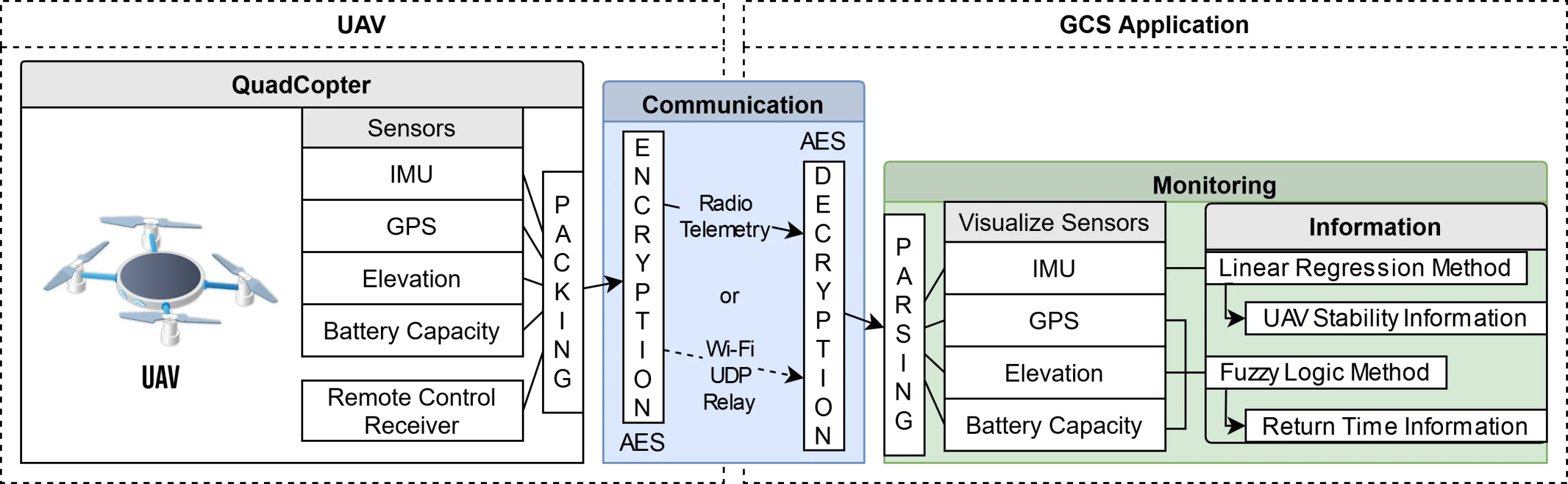
Security & Communication
- AES-128 Encryption: Hardware-accelerated
- Dual Communication Modes:
- Radio Telemetry: Long-distance
- Wi-Fi/UDP: Low-latency short-range
- MAVLink: Industry-standard UAV communication protocol
Intelligent Flight Management
Real-Time Stability Assessment
A Flight Stability Detection using linear regression analysis
- Monitors attitude changes over sliding window
- Visual stability indicators:
- Critical (Red): Very tilted
- Warning (Yellow): Tilted
- Stable: No warning
Return-Time Prediction
A Fuzzy Inference System (FIS) with input variables:
- Battery percentage
- Distance from ‘home’
- Altitude
- Output: Visualization of estimated remaining return time window.
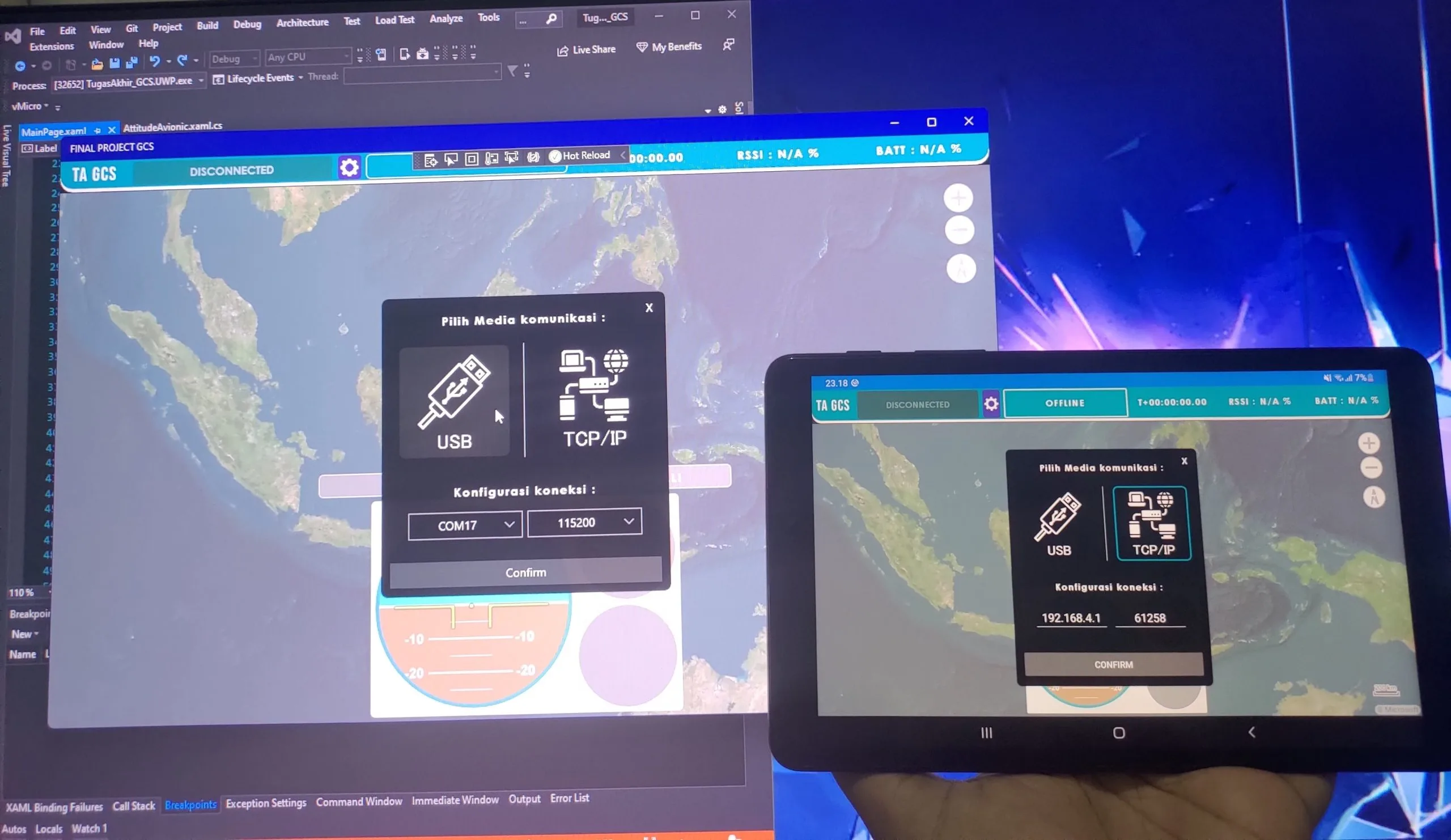
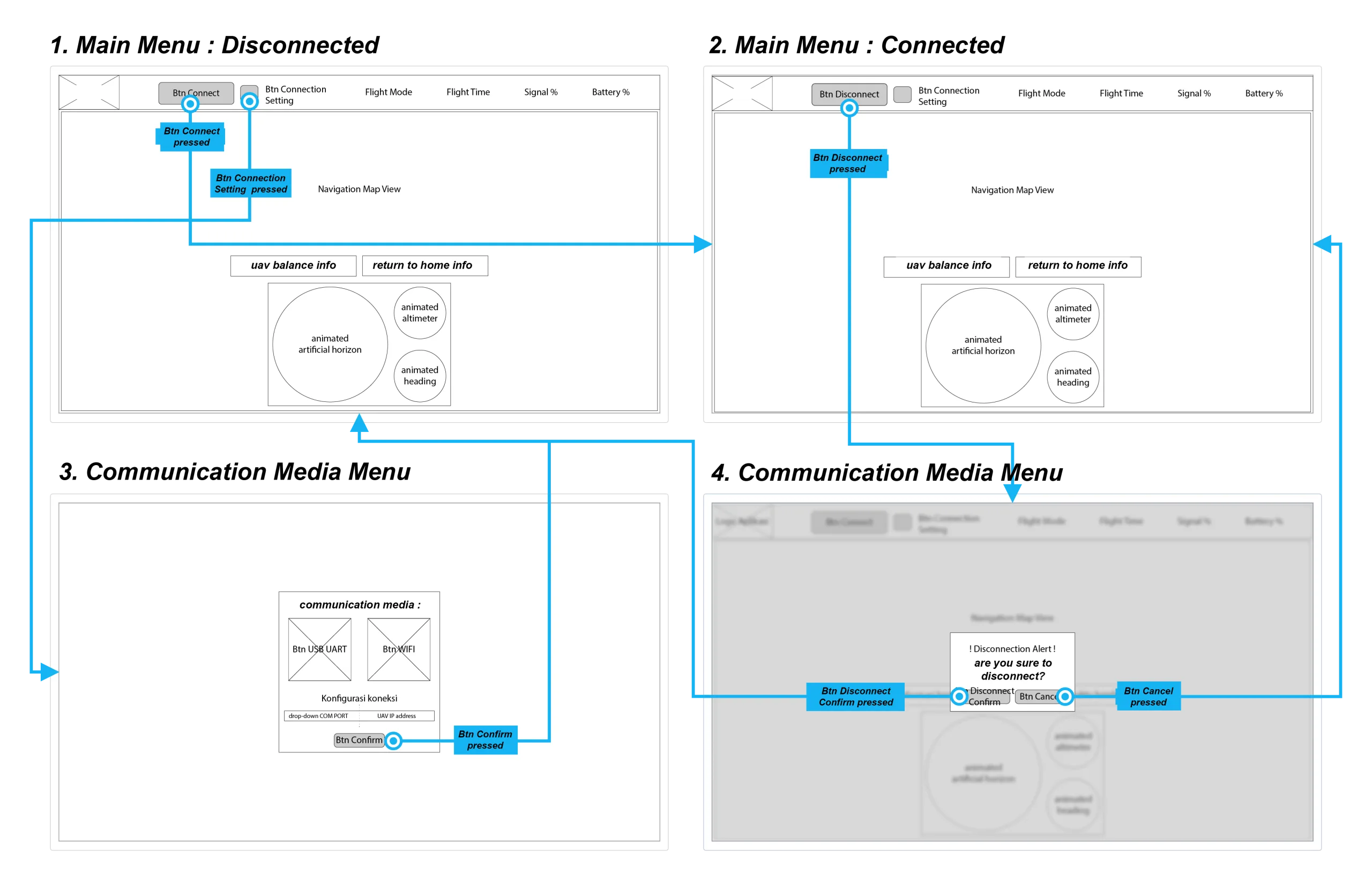
User Interface
Cross-Platform Support
With Xamarin.Forms to run on Windows (UWP) and Android.
Real-time Avionic Displays
- Artificial Horizon: pitch and roll
- Altimeter: Current altitude
- Compass: Magnetic-pole bearing/heading
- GPS Map: Live position tracking
- Signal Strength: Communication quality
Technical Implementation
Architecture
Embedded System (STM32):
- Hardware AES-128 crypto acceleration
- UART communication with radio telemetry or ESP Serial-WiFi bridge
- Real-time sensor data processing
GCS UI App:
- Language: C#/.NET
- Framework: Xamarin.Forms
- Platform Services:
- Serial port (USB/UART)
- UDP socket
- Libraries:
- FLS (Fuzzy Logic Sharp) for fuzzy inference
- MAVLink.NET for protocol
Fuzzy Logic Implementation
The FIS uses Center of Gravity (CoG) defuzzification with:
- Battery membership: Kritikal, Low, Medium, High
- Distance membership: Dekat, Sedang, Jauh
- Altitude membership: Rendah, Sedang, Tinggi
- Output function: S-shaped curve for smooth transitions
Rule Example:
IF Battery IS Critical THEN Return Time IS Immediate
IF Battery IS Low AND Distance IS Far AND Altitude IS High THEN Return Time IS High Priority
Full Demonstration
Links
This description is written with help of AI tools, but the project IS NOT. You can verify the source codes via the provided links where available.