PIGEON — Pilot's Ground Control Station
Project Overview
Patent-pending UAV ground control station with real-time telemetry and multi-protocol support
Skills Used
Overview
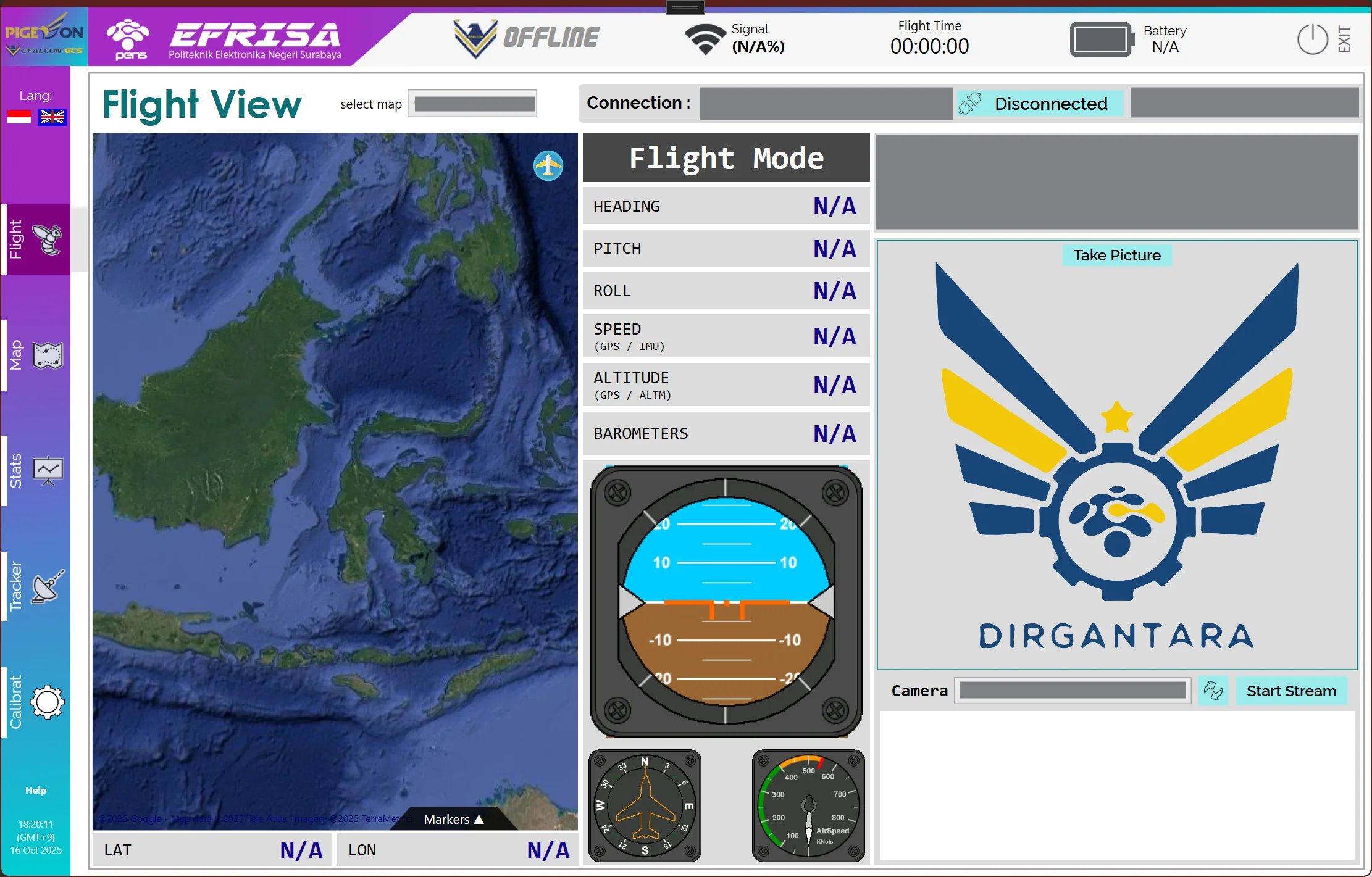
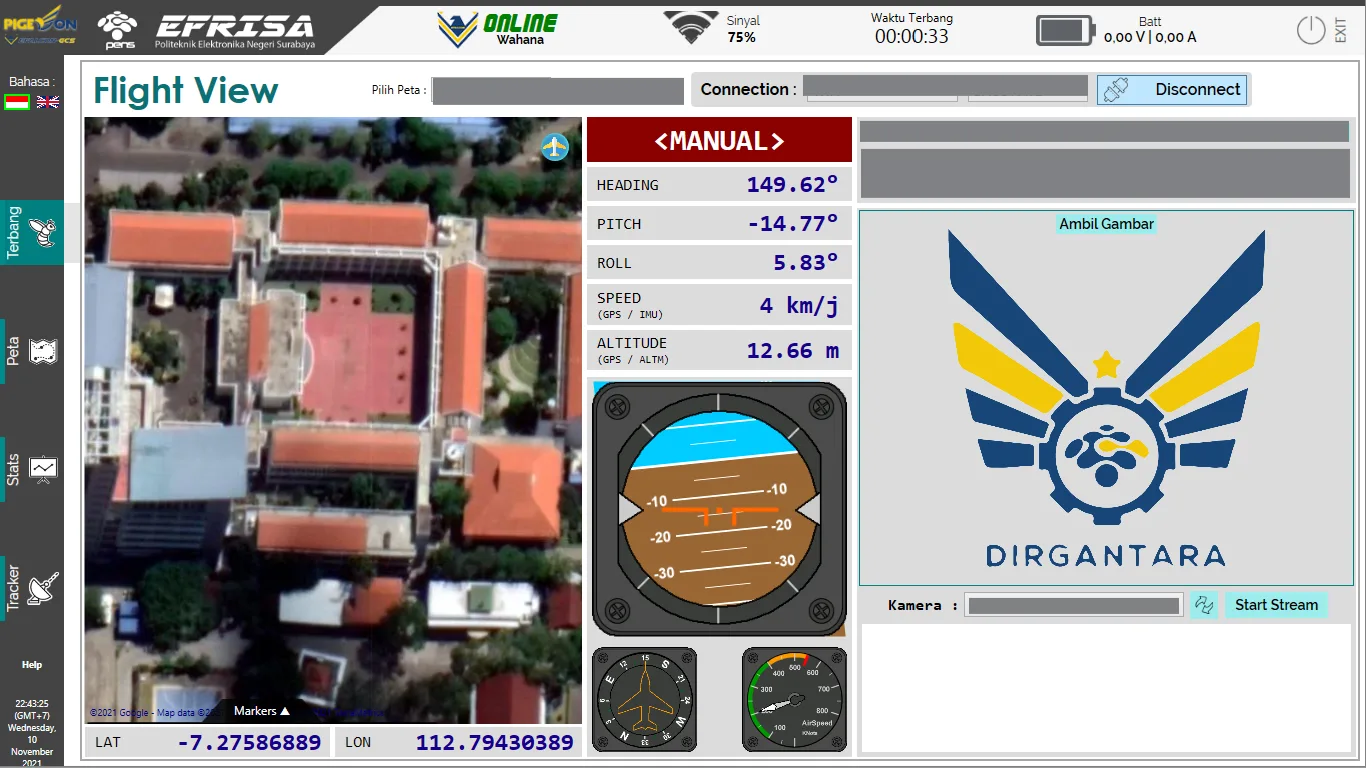
PIGEON (Pilot Ground Control Station) is a patent-pending ground control station for UAVs, providing real-time telemetry visualization, flight control, and mission planning for fixed-wing and multi-rotor aircraft. Built with WPF, it supports MAVLink protocol communication via Serial, WiFi, and internet connections.
Features
Telemetry Displays
- Artificial horizon (attitude indicator) with real-time pitch/roll
- Barometric altitude and airspeed gauges
- GPS navigation with interactive map (GMap.NET)
- Connection quality, flight time, and battery monitoring
- Live video feed integration
Flight Control
- PID tuning interface for Roll, Pitch, Yaw parameters
- Waypoint mission planning and upload
- Flight mode configuration (Manual, Stabilize, Auto)
- Compass calibration with progress monitoring
- Servo output and RC channel monitoring
Connectivity
- MAVLink 2.0 protocol for ArduPilot/PX4
- Serial/UART, WiFi/TCP, and internet-based connections
- Socket.IO for remote telemetry streaming
- Multi-aircraft support (quadcopters, planes)
- Additional antenna tracker (TRITON) relay
Interface
- Multi-view layout (Flight, Map, Statistics, Tracker views)
- Strategic instrument placement for optimal situational awareness
- Multi-language support (Indonesian/English)
- CSV data logging for post-flight analysis
Technical Stack
.NET/WPF · MAVLink · GMap.NET · Socket.IO · AForge.NET · WebView2
Demonstration
Patent Innovation
The UI design features patent-pending ergonomic instrument placement optimized for UAV operations, with the artificial horizon centered and critical indicators (altitude, airspeed, battery) positioned for immediate visibility and operator safety.
Developed by EFRISA (EEPIS Flying Robot for Indonesia), GCS Division.
Links
EFRISA, GCS Division
Due to the patent-pending status and commercial nature of this project, the source code is not publicly available
This description is written with help of AI tools, but the project IS NOT. You can verify the source codes via the provided links where available.